
CAN-Bustechnologie: Der Standard für vernetzte Systeme in der modernen Industrie
Die CAN-Bustechnologie (Controller Area Network) hat sich längst vom Automotive-Standard zur unverzichtbaren Kommunikationsschnittstelle in einer Vielzahl von Industrien entwickelt. Ob in der Medizintechnik, Industrieautomation, Landwirtschaft, Energiewirtschaft, Gebäudeautomation oder maritimen Systemen – CAN und seine Ableitungen CANopen und J1939 bieten eine robuste Grundlage für die sichere Vernetzung komplexer elektronischer Systeme.
Warum CAN? Die bewährten Vorteile sind beeindruckend: hohe Störfestigkeit gegenüber elektromagnetischen Interferenzen, deterministische Echtzeitfähigkeit, integrierte Fehlererkennung und die Fähigkeit, Dutzende oder Hunderte von Geräten fehlertolerant zu vernetzen.
Mit der Weiterentwicklung CAN-FD (Flexible Data Rate) eröffnet sich eine neue Dimension für zukunftssichere Systeme. CAN-FD erhöht die verfügbare Bandbreite um das 3- bis 8-Fache gegenüber klassischem CAN, ermöglicht Datenrahmen bis zu 64 Byte statt 8 Byte und bietet flexible Datenraten bis zu 5-8 Mbit/s in der Datenphase. Damit wird CAN-FD zur idealen Lösung für moderne, datenintensive Anwendungen – von Elektrofahrzeugen bis zu komplexen Automatisierungssystemen.
Die Skalierbarkeit, Zuverlässigkeit und Rückwärtskompatibilität von CAN und CAN-FD schaffen Flexibilität für die schrittweise Modernisierung bestehender Systeme ohne Bruch. Von bildgebenden Verfahren in Krankenhäusern über Windkraftanlagen bis zu Schiffen – überall dort, wo Geräte sicher und echtzeitkritisch miteinander kommunizieren müssen, setzt die Industrie auf diese bewährte und zukunftsfähige Buskommunikation.
Als etablierter Standard mit Jahrzehnten Einsatzerfahrung und kontinuierlicher Weiterentwicklung bietet CAN nicht nur heutige Lösungen, sondern zukunftssichere Perspektiven für die digitale Transformation der Industrie.
Drei Jahrzehnte Kompetenz in der Feldbus-Diagnostik
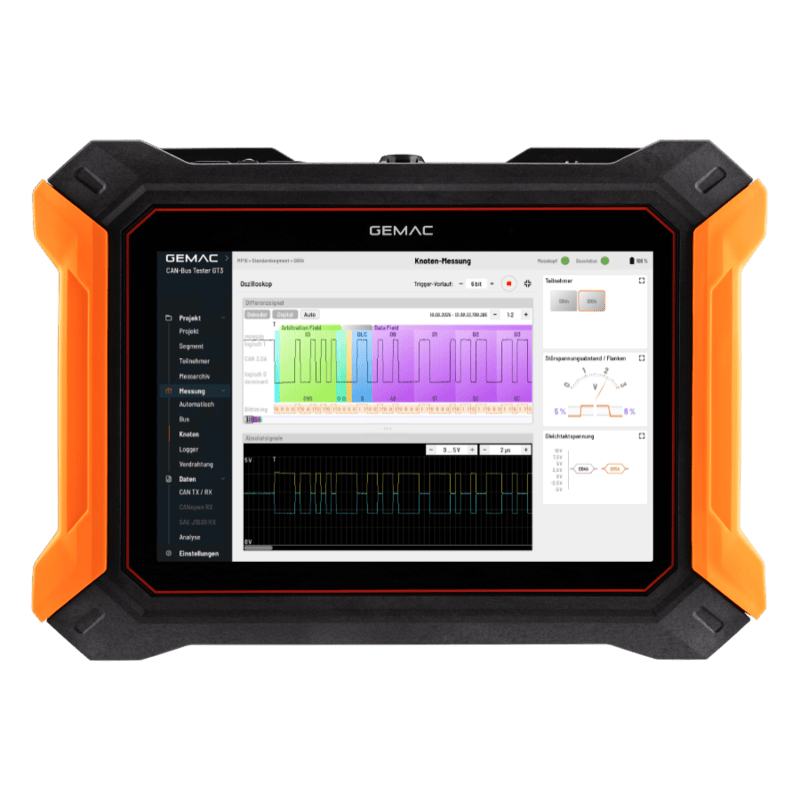
Seit über 30 Jahren entwickelt GEMAC Chemnitz hochpräzise Messtechnik für die Diagnostik von Feldbus-Systemen. Die Vorgängergeräte wie CAN-Bus Tester 2 und CANtouch legten früh den Grundstein für ein innovatives Verständnis: Während andere Hersteller nur auf Protokollebene arbeiteten, erkannte GEMAC die kritische Bedeutung der physikalischen Schicht. Der CAN-Bus Tester GT3 verkörpert diese Philosophie konsequent weiter – ein mobiles Tablet-Diagnosegerät, das Feldtechniker und Entwickler befähigt, CAN-Probleme dort zu lösen, wo sie entstehen.
Tiefgehende Messmöglichkeiten auf allen Ebenen
GEMAC-Messgeräte analysieren Feldbus-Systeme auf einer Tiefe, die andere Geräte nicht erreichen: Die physikalische Messschicht erfasst hochauflösend Busspannungen, CAN-Pegel, Setup/Hold-Zeiten und Signalqualität – jeder Messwert wird mit Ampelfarben bewertet. Die logische Ebene dekodiert CAN-IDs, CANopen-Objekte, SAE J1939-Parameter sowie ISOBUS und NMEA2000 in Echtzeit. Die intelligente Diagnose erkennt automatisch Fehler, unbeantwortete Anfragen und Protokollverletzungen, während der integrierte Logger Zeitverläufe für die Störungsanalyse erfasst.
Mit Unterstützung für CAN, CANopen, DeviceNet, SAE J1939, ISOBUS und NMEA2000 bieten GEMAC-Geräte maximale Flexibilität für Baumaschinenbau, Landwirtschaft,
Automobil, Medizintechnik und darüber hinaus.
GEMAC-Feldbus-Messgeräte: Mehr Informationen bekommen Sie von keinem anderen Gerät.
Innovative technology at an introductory price – for a limited time only. As part of the product launch, we are offering this device at attractive introductory rates for a limited time. If you order by December 31, 2026, you’ll receive the GT3 with all licenses for 36 months.
6.400,00€

inkl. CANtouch, Netzteil, USB-Kabel, Handbücher, 6 Messungen (weitere Messungen als optionale Lizenz) Country of origin: GERMANY Zolltarifnummer: 9030 39 00
2.485,00€

CANalarm Diagnosestecker (optionale Softwarelizenzen erhältlich)
252,00€